I like to learn by doing. I'll come up with a thing I want to do, then learn what I need to do to accomplish that. It can take me down some interesting roads and leave me with a collection of odd skills that are difficult to explain. I could start riffing on educational theory, but this is a car forum :)
The speedometer in the Targa Miata doesn't work. That's because an NA Miata has a mechanically driven speedometer and a T56 has an electrical sender. There are a few ways around this - retrofit the almost-but-not-quite-identically-shaped NB cluster, or drive a speedo cable using a motor in a "gerbil box" - but I've never implemented one.
Meanwhile, the advent of the open-wheel Tipo 186 monoposto kit got me thinking about how to emulate a chronometric tachometer - basically, a clockwork driven tach that only updates every second or so. You can see them in the opening sequence of Grand Prix, for example. Stack makes a tach that pretendes to be one of their old chronometric tachs up to 4000 or so, then it becomes a proper stepper-driven real tach for driving hard instead of hard parking.
Both of these got me thinking about using a stepper motor for gauges and how that would work. This would require learning some new and interesting skills. And then it snowballed.
This is the build thread for my analog race dash. At the time I'm starting this thread, it's not done. But I figured I'd invite you all along because the GRM brain trust has good ideas and a deep level of knowledge and hey, my wife just doesn't get excited enough when I tell her about my progress so I'm counting on all of you.
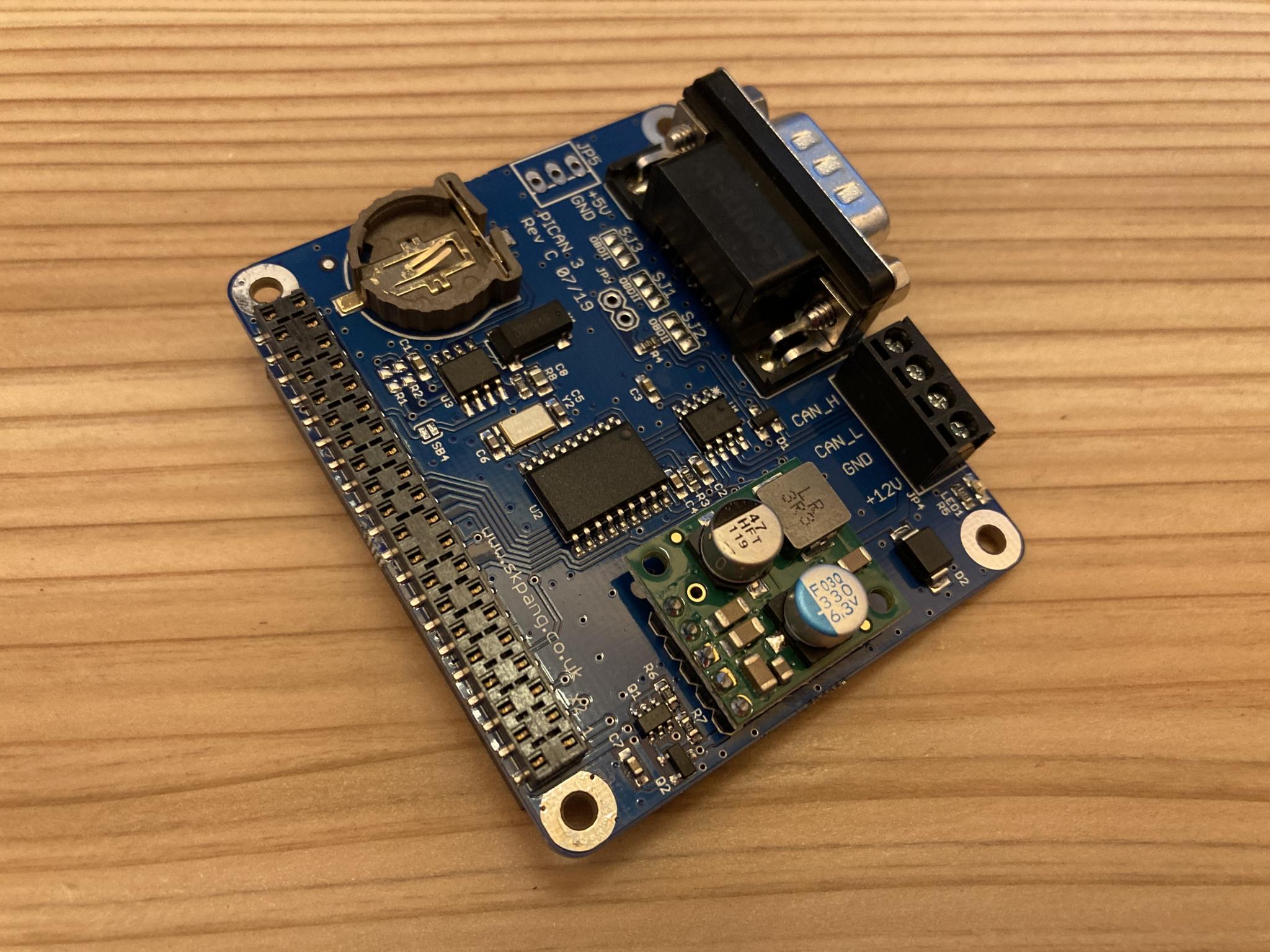
I decided from the start that I'd use a Pi to run the dash. Why Pi and not Arduino? Because a Pi is closely related to the grown-up computers I use on a regular basis and I have a certain level of familiarity with the platform. It also makes my new skills more transferrable. Besides, I can do a lot of stuff with a Pi. My race dash could double as a dash cam, for example. Or a music source. Or it could download a log of a drive when I park in the garage. Whatever. Pis bring a few of their own challenges but I'm cool with that.
So let's get started...